Bevezetés
Célkitűzések
Jelen labormérés célja, hogy a hallgatók játékos formában és minimális programozási teher mellett ismerkedjenek meg a kooperatív autonóm ágenseket tartalmazó rendszerek fejlesztésének gyakorlati aspektusaival.
A méréshez egy teljes grafikus keretrendszert biztosítunk. A célunk ezzel az, hogy a hallgatók a hatékony ágens vezérlési stratégiák kitalálásában, majd e stratégiák többágenses együttműködés esetére történő kiterjesztésében gyakorlati tapasztalatokat szerezhessenek.
A labor lebonyolítása
A MIT3 és MIT4 labormérések lebonyolítása a hagyományostól eltérő módon történik úgy, hogy a hivatalosan az órarendben ütemezett laboralkalmak során mindössze konzultációs lehetőséget nyújtunk, mely konzultáción a részvétel nem kötelező. A labor teljesítéséhez a laborfeladatok megfelelő szinten történő kidolgozása és a kapcsolódó elektronikus jegyzőkönyv határidőre történő beadása a követelmény a https://hf.mit.bme.hu portálon keresztül, a konzultáción történő személyes megjelenés nem.
A mérés során a hallgatók önállóan dolgoznak, a feladat teljesítése és értékelése is egyénileg (nem mérőpárokban) történik. A mérés tervezett időigénye: 1 óra felkészülés, 1 óra ismerkedés a keretrendszerrel valamint 3 óra ágens fejlesztés, kísérletezés és dokumentálás.
Kooperatív ágensek
Utóbbi években az informatikai technológiák elé tornyosuló egyik legkomolyabb kihívás a katasztrófahelyzetek elhárításának hatékony támogatása vált. Informatikai/robotikus megoldások számos előnnyel rendelkeznek: működőképesek maradnak az ember számára adverz körülmények között, döntési és kooperativítási képességeiben kevésbé érzékenyek az embereket lebénítő streszhatásokra, miniaturizálás révén képesek ott is szolgálni, ahol az emberi, vagy az állati mentők testméretei ezt lehetetlenné teszik, végül, de nem utolsósorban a gépi intelligencia, a gépi tanulás beépítése révén komoly partnerséget jelenthetnek az emberi mentőcsapatok számára.
Az ilyen informatikai alkalmazások alapvető problémája, hogy a megtervezett szoftver (és hardver) helyessége formálisan érdemben nem verifikálható, hiszen ehhez rendelkezni kellene a feladat részletes formális specifikációjával. Egyetlen kiút a megfelelő pontosságú és komplexitású szimulációk és ebből a körből merít a jelen mérési feladat.
A feladat
Jelen labor során a feladat egy szimulált környezetben olyan autonóm robotok vezérlésének megtervezése, melyek földrengés után a megrongálódott épületekben kutatnak túlélők után. Az ilyen robotok fejlesztése napjainkban komoly hangsúlyt kapott, ugyanis egy épületeket összedönteni képes földrengés általában olyan nagy területet érinti, hogy a mentéshez sosem áll rendelkezésre kellő létszámú emberi személyzet. Ilyen helyzetben óriási segítség lehet, ha az áldozatok felkutatásában olyan autonóm robotok is segítséget tudnak nyújtani, melyek emberi távfelügyelet nélkül képesek nagy területet bejárni, illetve a szűk réseken bejutva olyan helyeket felderíteni ahova például csak mentőkutyák juthatnának be.

Jelen laborfeladat során ebben a környezetben működő robotoknak kell a vezérlő programját elkészíteni. A feladat során a laborra rendelkezésre álló korlátos időkeret miatt az alábbi egyszerűsítésekkel élünk a valósághoz képest:
- A robotok feladata egyetlen épület felderítése, tehát viszonylag kis méretű pályán kell dolgozniuk – a valóságban általában sokkal nagyobb a bejárandó terület.
- Feltételezzük, hogy a robot az épület területének nagyobb részén szabadon tud mozogni, vagyis nem foglalkozunk a nehezen hozzáférhető részekkel és az esetleges mechanikai problémákkal a mozgás során – a valóságban komoly mérnöki kihívást jelent a robotok számára ilyen környezetben mozogni.
- Feltételezzük, hogy a robot képes a megtalált sérülteket önállóan megmozdítani és az épületből kivinni – a valóságban a robotok mérete és felszereltsége egyelőre nem tesz lehetővé ilyen jellegű autonóm mentést, ráadásul a sérültek mozgatása orvosi szempontból is aggályos lehet.
- Nem foglalkozunk a robotok véges tápellátásával, vagyis az akkumulátorok kimerülésével és esetleges töltésigényével.
- Nem foglalkozunk ütközéselkerüléssel: a pályán csak robotok mozognak, és nekik most megengedjük, hogy egy pozíción egyszerre többen is tartózkodjanak.
A RescueFramework keretrendszer
Bevezetés
Az RescueFramework keretrendszer egy Java alkalmazás, mely teljes forráskóddal innen tölthető le. Az alkalmazás RescueFramework főosztályának main() metódusával futtatható és önálló grafikus felülettel rendelkezik. A feladat megoldása során a keretrendszer rescueagents package-ében található RobotControl osztályban kell implementálni a robotok vezérlését.
A grafikus szimulátor
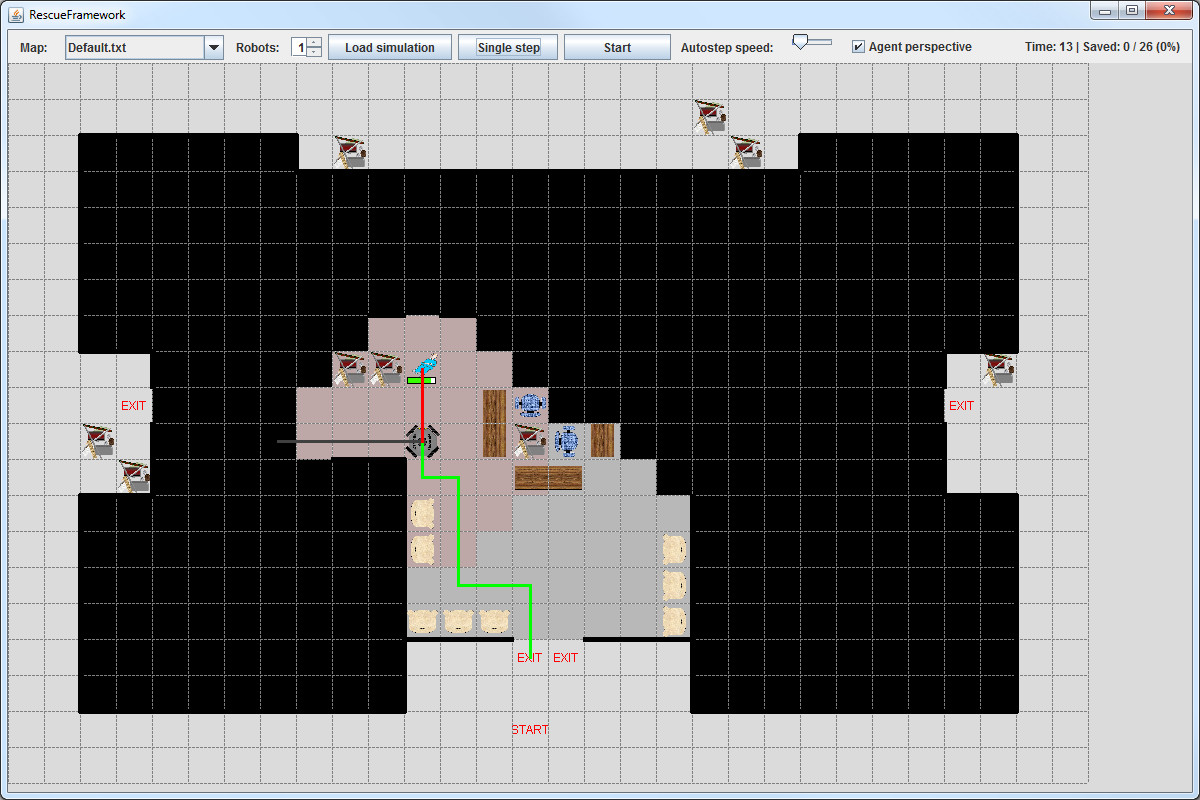
A keretrendszer grafikus felületének főablakát az alábbi ábra szemlélteti.
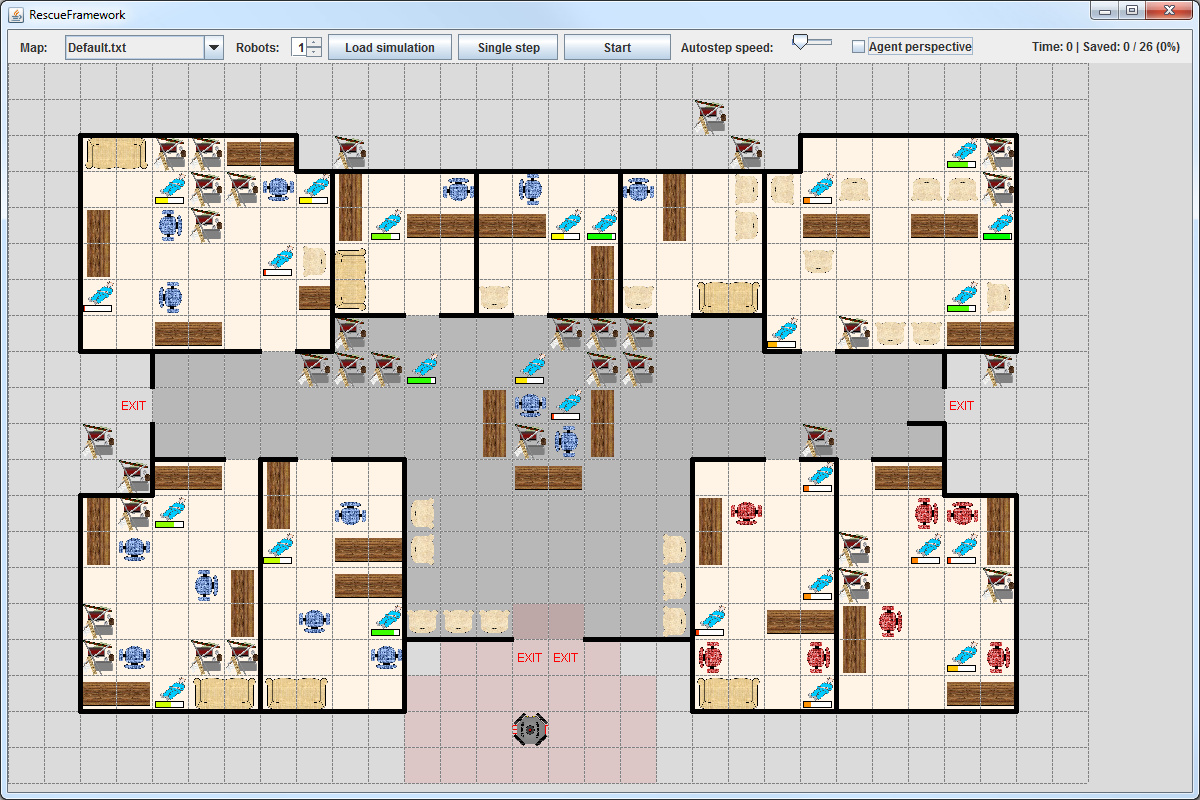
A felhasználói felületen a következő beállítások végezhetők el:
- Map: itt van lehetőség választani a térképek közül (a program a maps alkönyvtár fájljait ajánlja itt fel)
- Robots: ebben a mezőben lehet megadni, hogy hány robot példány szerepeljen a futtatott szimulációban.
A szimuláció a következő eszközökkel vezérelhető:
- Load simulation gomb: betölti a térképet és létrehozza a beállított számú robotot a térképen meghatározott kezdő pozíción. A térkép épületen belüli része ismeretlen a robotok számára.
- Single step gomb: minden résztvevő robot egyetlen lépést tesz az implementált stratégiának megfelelően.
- Start / Pause gomb: a szimuláció automatikus léptetése indítható illetve állítható meg.
- Autostep speed csúszka: a szimuláció automatikus léptetésének sebessége állítható itt.
- Agent perspective mező: be- illetve kikapcsolható a térképen a robotok által még fel nem fedezett mezők kitakarása.
A keretrendszer bármikor lehetőséget biztosít tesztelési céllal beavatkozni és kézzel vezérelni az első robotot:
- A billentyűzet fel-le és jobbra-balra gombjaival közvetlenül léptethető az első robot.
- Az egérrel a pálya tetszőleges cellájára kattintva a robot oda áthelyezhető.
A szimulátorban az alábbi objektumokkal találkozhatnak a robotok:
 Autonóm robot: az első robot kézzel is vezérelhető, a további robotok csak autonóm működésre képesek. Egy mezőn egyszerre több robot is tartózkodhat a működés során.
Autonóm robot: az első robot kézzel is vezérelhető, a további robotok csak autonóm működésre képesek. Egy mezőn egyszerre több robot is tartózkodhat a működés során.
 Elő és már elhunyt sérültek: a szimulátor a sérült alatt zöld-piros átmenetes sávval jelzi a sérült hátralevő életerejét, mely minden körben eggyel csökken.
Elő és már elhunyt sérültek: a szimulátor a sérült alatt zöld-piros átmenetes sávval jelzi a sérült hátralevő életerejét, mely minden körben eggyel csökken.


 Bútorok és törmelékkupacok (a robot számára járhatatlan mezők)
Bútorok és törmelékkupacok (a robot számára járhatatlan mezők)
A pályán kétféle speciális mező található:
- Start mező: innen indulnak a robotok.
- Exit mezők: az EXIT felirattal rendelkező mezőkön történik a sérültek átvétele a robotoktól.
A szimulátor működése során segítségül mindig megjeleníti a legközelebbi kijárathoz (zöld), a legközelebbi sérülthöz (piros) és a legközelebbi elérhető de felderítetlen mezőhöz (szürke) vezető utakat (lásd az alábbi ábrát).
A konkrét feladat
A fentiek alapján a feladat úgy foglalható össze, hogy a robotoknak fel kell kutatniuk a pályán található sérülteket és azokat egy exit mezőre kell szállítaniuk lehetőleg még élve. A szimuláció akkor ér véget, ha minden sérült (élve vagy holtan) egy exit mezőre került, ekkor értékeli a keretrendszer a robotok teljesítményét az élve megmentett sérültek százalékos arányának kiszámításával.
A sérültek kezdő életereje és pozíciója fixen rögzített a pályán, azonban a robotok számának növelésével a sérültek életereje arányosan csökken (tehát az egy robot esetén 300 egység életerővel rendelkező sérült három robot esetén már csak 100 egység életerővel rendelkezik). Minden körben minden robot tehet egy lépést további minden megmentésre váró sérült életereje is egy egységgel csökken.
A robotok egyszerre egy sérültet tudnak szállítani, akinek a felvétele automatikus a cellájára lépve. A sérült leadása is automatikusan történik akkor, ha egy sérültet szállító robot egy exit mezőre lép. A szimuláció automatikus léptetése megáll, ha minden sérült (vagy elhunyt) kimentésre kerül, vagy ha egyetlen robot se kíván további lépést tenni.
Ágens fejlesztése
A keretrendszer egy hagyományos Java alkalmazás formájában került megvalósításra. Az alkalmazáson belül három package található: az rescueagents tartalmazza a robotokat vezérlő ágens osztályt, a rescueframework a keretrendszer forrásfájljait, míg a world package a világot leíró fájlokat tárolja.
Az ágensek forráskódja
Az rescueagents package RobotControl osztályában van lehetőség az ágensek intelligenciájának implementálására. A RobotControl osztály az AbstractRobotControl leszármazottja, ahol a robotok egyedi számmal történő ellátása került implementálásra.
Szükség esetén használható az world package AStarSearch statikus osztálya, mellyel A* keresést lehet megvalósítani két cella között a robotok által ismert cellákat figyelembe véve:
Path AStarSearch.search(Cell start, Cell target, int maxDistance)
Ezzel a függvénnyel a start cellából a target cellába kereshetünk utat, mely maximum maxDistance lépés hosszú. A maxDistance értékét -1-re állítva nincs korlátozás a megtalált út hosszára. Ha nem található út a két cella között, akkor a függvény NULL értékkel tér vissza.
A visszakapott Path objektum getFirstCell() függvénye adja a cél felé vezető út első lépését. Az úton történő elinduláshoz a directionFrom(robot.getLocation()) függvény használható.
Az ágens érzékelése
A robot a RobotPercepcion interfészen keresztül az alábbi függvényekkel fér hozzá a világ állapotához:
public int getTime();
Visszaadja a szimulációs idő értékét.
public ArrayList
Visszaadja az exit cellák listáját.
public ArrayList
Visszaadja a robotok által még fel nem derített cellák listáját.
public ArrayList
Visszaadja a már felderített sérültek listáját.
public ArrayList
Visszaadja a robotok cellák listáját.
public Path getShortestExitPath(Cell start);
Kiszámítja a legközelebbi kijárathoz vezető utat.
public Path getShortestUnknownPath(Cell start);
Kiszámítja a legközelebbi felderítetlen cellához vezető utat.
public Path getShortestInjuredPath(Cell start);
Kiszámítja a legközelebbi sérülthöz vezető utat.
Az ágensek implementálása során az itt bemutatott érzékelésekre kell támaszkodni, tehát a világot direktben reprezentáló world.Map osztályhoz nem fordulhatnak az ágensek információért!
Az ágens beavatkozási lehetősége
A RobotControl osztály step() függvénye egy Integer objektummal tér vissza, melynek jelentése az alábbi lehet:
- NULL: a robot nem kíván megmozdulni
- 0: a robot felfelé kíván lépni
- 1: a robot jobbra kíván lépni
- 2: a robot lefelé kíván lépni
- 3: a robot balra kíván lépni
A visszaadott érték alapján a szimulátor ellenőrzi, hogy az adott irányba lehet-e lépni (nincs-e ott bútor vagy törmelék kupac) és végrehajtja a lépést. Ha a célcellán sérült tartózkodik és a robot nem szállít még sérültet, akkor automatikusan felveszi azt. Ha a célcella exit cella és a robot sérültet szállít, akkor a robot automatikusan leadja a sérültet.
Mérési feladatok
Feladatok
A mérés során a feladat a fentiekben ismertetett RescueFramework keretrendszerrel kell megismerkedni, majd egy önállóan hatékony és csapatban dolgozni is képes ágens kifejlesztése a cél.
Előkészületek
A keretrendszer innen tölthető le. A feladatok megoldása során használja a „Default.txt” térképet!
1. Feladat – Ismerkedés a szimulátorral (0.5 pont)
Ismerkedjen meg a szimulátor grafikus felületével és a pályával! Kézi vezérlés módban (a billentyűzet fel-le-jobbra-balra gombjaival vezérelve a robotot) járja be a pályát és juttassa ki a sérülteket!
1. kérdés
Készítsen képernyőképet az összes sérült kézi megmentése után a szimulátor ablakról!
 Ehhez a válaszhoz kép csatolása szükséges.
Ehhez a válaszhoz kép csatolása szükséges.